在二战潜艇模拟类游戏UBOAT中,玩家可以通过陀螺仪和散布角度来使用鱼雷瞄准,这种瞄准操作比较复杂,部分玩家不知道具体要怎么操作,下面就为大家带来UBOAT鱼雷瞄准的操作方法,有需要的玩家可以参考。
uboat鱼雷瞄准方法
1. 下图绿色为可输入项,蓝色为输出项。最终鱼雷通过10陀螺仪和散布角度来确定射出后要偏转多少角度。

2. 在目标接触设为可视化时,这些角度可以通过侧边栏的方位角工具直接测得。
在船身上点一下,即为圆心,拉出的线即为相对于该船航向的夹角。此时0度表示舰船航向。
当圆心设置在空白处时,则以正北为0度。

3. 在禁用可视化的情况下,地图只会显示自己的船,不会显示其他船只,这时候测量AOB就得采用描点法或估算法。
描点法就是每隔一段时间测量目标的方位角和距离,描在地图上,形成一条点列,以此指示目标航向。
配合秒表可以同时测量航速。

再进阶一点可以脱离目视,通过水听器提供的角度设定来确定方位角,画出射线,进而确定鱼雷航迹在直接盲射。一般用于能见度差,距离较劲的情况。
4. 在此推荐使用两种方法,长宽法和航线法。
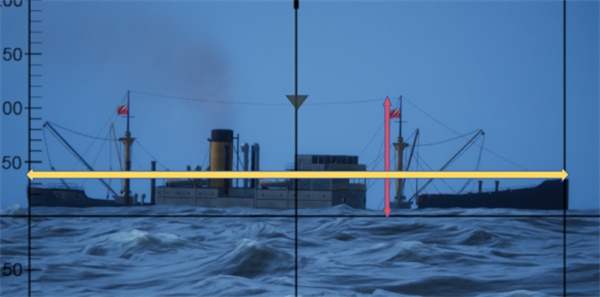
长宽法是测量目标在镜头中的的桅杆和船身的比值,与识别手册上的标准值对比,通过三角函数的计算得到结果。
缺点是在AOB接近60以上时的误差非常大。
航线法则是结合当前地理位置和航线,判断目标的所属的航线组和下一个节点,指向这个节点的就是大致的航向。
缺点是只适用于空旷海洋,海岸的节点太过密集。
一些理论计算
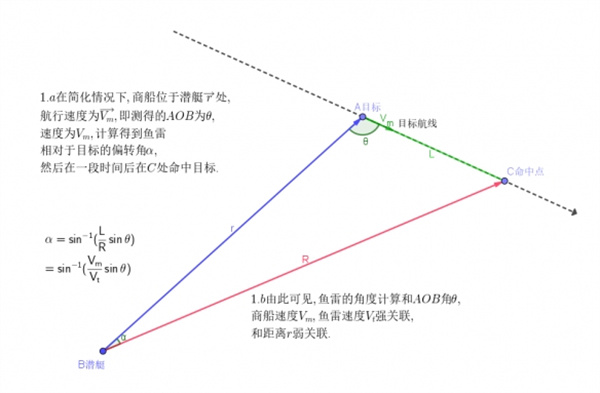
计算1. 偏转角
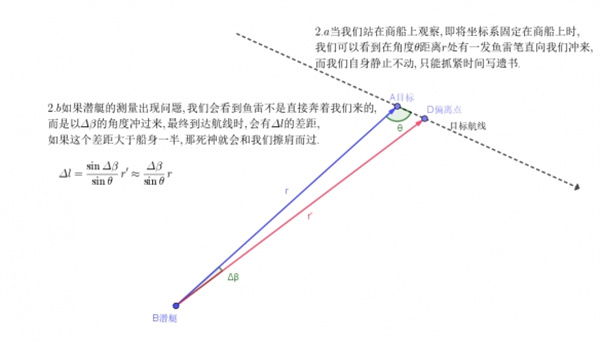
计算2. 相对坐标系和误差定义
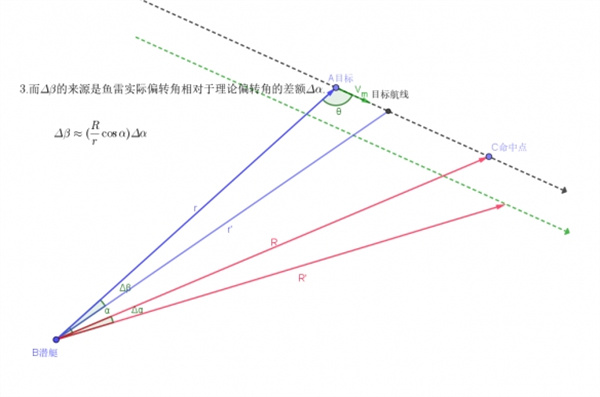
计算3. 绝对坐标系和偏转角误差
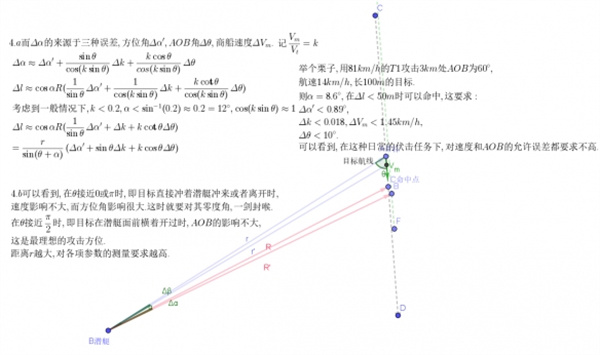
计算4. 误差组成和极限误差
在关联目视镜时,我们可以得到精确到0.1度的方位角,而在水听或者作图盲射时,方位角的精度为1度,这在3公里的距离上基本相当于一个船身了,基本得靠运气才能盲射中。 UBOAT鱼雷瞄准方法分享及部分误差说明的全文就介绍到这里,如果对您有所帮助,不妨也转发给其他需要的玩家,更多UBOAT鱼雷瞄准怎么操作攻略正在添加中。